機械システム工学科野田幸矢助教が、日本機械学会ロボティクスメカトロニクス講演会部門優秀論文表彰を受け、このほど山下治校長に受賞の報告を行いました。論文名は「二重ダイヤフラム型起歪体による鉗子力センサの力分解能当等方化」で、野田助教が大学院博士課程在学中からの研究をまとめたものです。
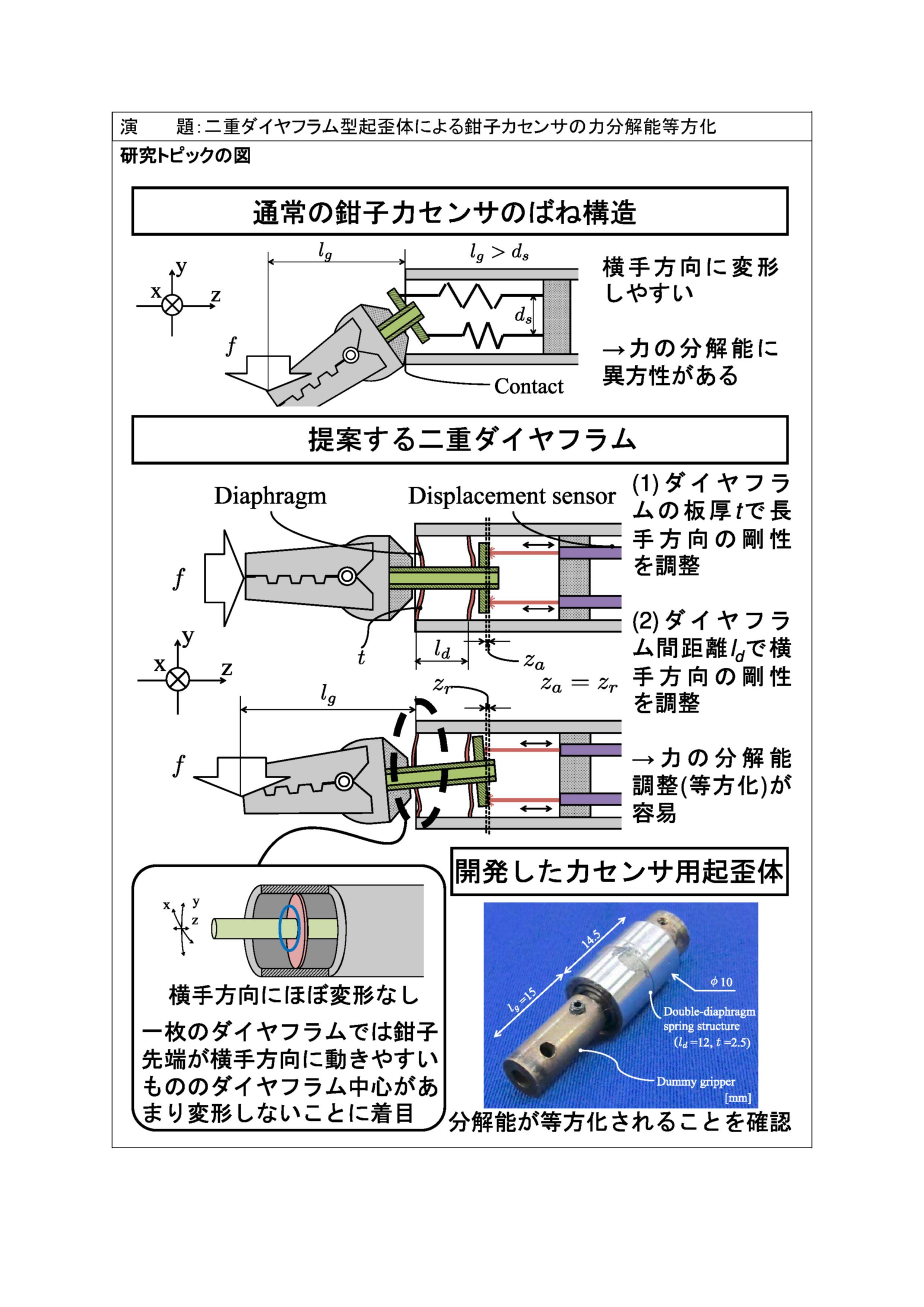
腹腔鏡(ふくくうきょう)※1手術等に用いられる鉗子(かんし)力センサの起歪体(きわいたい)※3には、鉗子長手方向より横手方向に変形しやすく、長手方向の力の感度が劣化する問題があります。この研究では、二重ダイヤフラム型起歪体を用いることで横手方向の剛性を向上させ、長手方向にも横手方向と同様の感度を持たせることを提案しています。実用化されれば、患者の臓器に必要以上の力をかけることを防ぎ、患者の体や手術する医師への負担軽減が図られるとのことです。
最後に野田助教から「受賞を励みに実用化に向け研究を継続します。」との報告がありました。
※1.腹腔鏡(ふくくうきょう)とは、体表皮膚より腹腔内挿入する内視鏡器具、もしくは手術手技のこと。
※2.鉗子(かんし)とは、物をつかんだり、牽引したりするのに使用する器具。主に手術器具として使う。
※3. 起歪体(きわいたい)とは:力センサに用いられるばね構造のこと。一般に力を直接計測できないため,ばねを変形させそのときの変位などを計測する。

受賞の報告をする野田助教(中央)報告を受ける山下校長(左)機械システム工学科髙橋章学科長(右)